Technika
Elektronika – Platooning – jak to funguje?
Milan Olšanský 15.06.2016 05:05
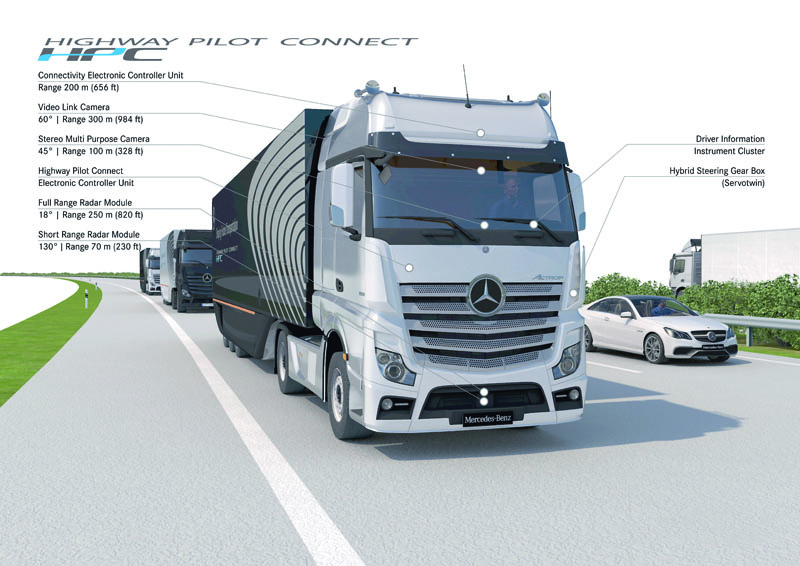
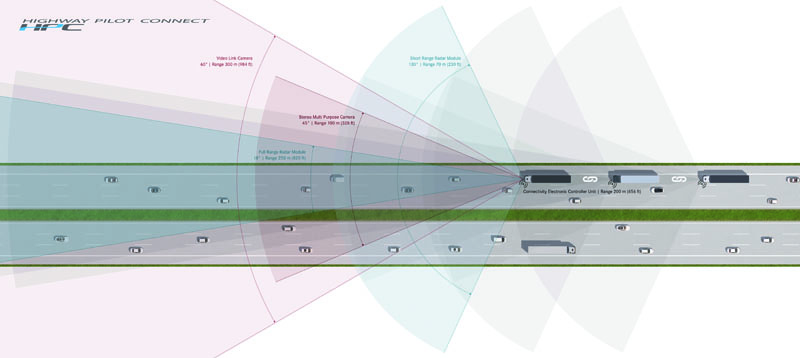
, Video kamera (600, dosah 300 m), Stereo multifunkční kamera (450, dosah 100 m), Řídící jednotka systému HP Connect, Dálkový radar (180, dosah 250m), Radar pro krátkou vzdálenost (1300, dosah 70 m), Přístrojová a informační deska řidiče, Servotwin – hybridní modul řízení.")
Seskupování vozidel do tzv. jízdních čet (Platoon) jako metoda zvýšení kapacity dopravní infrastruktury speciálně silnic a dálnic není žádná velká novinka. Její kořeny je možné nalézt v USA v počátku šedesátých let minulého století.
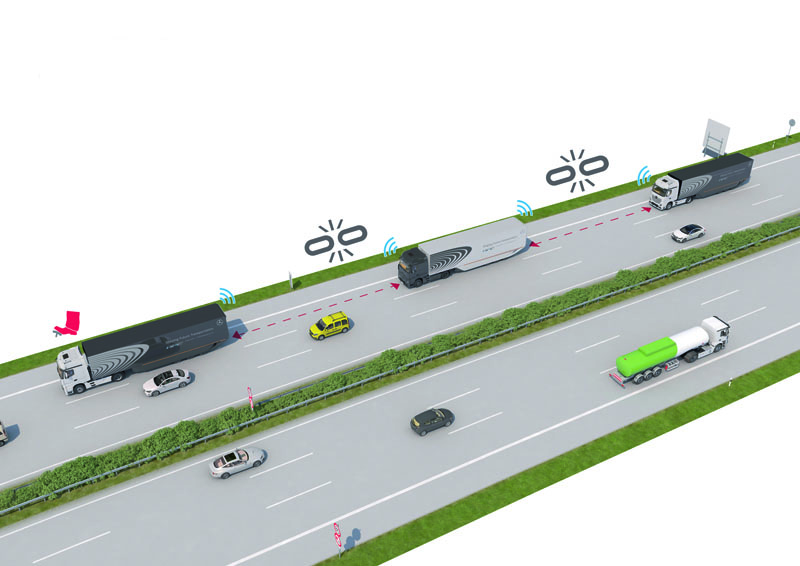
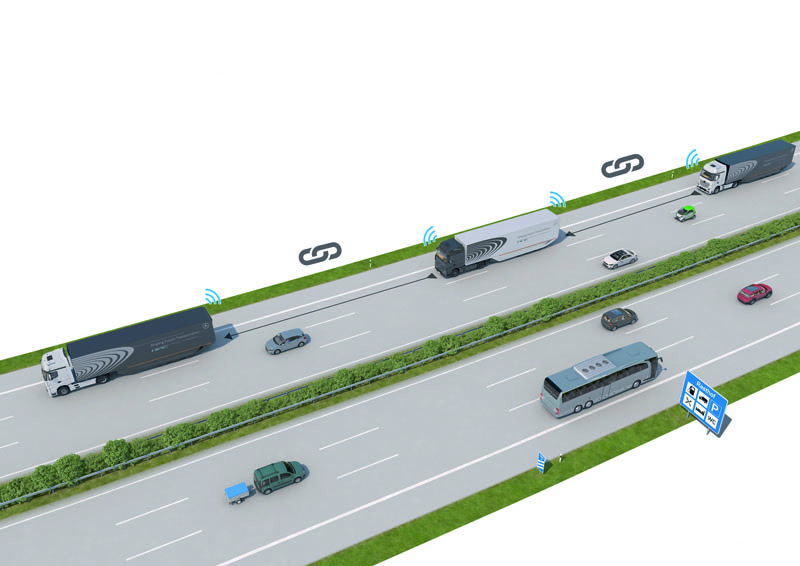
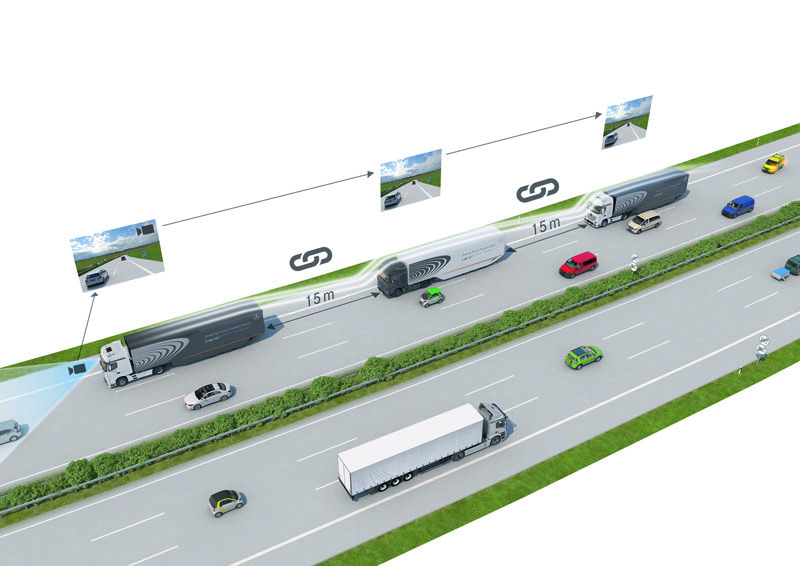
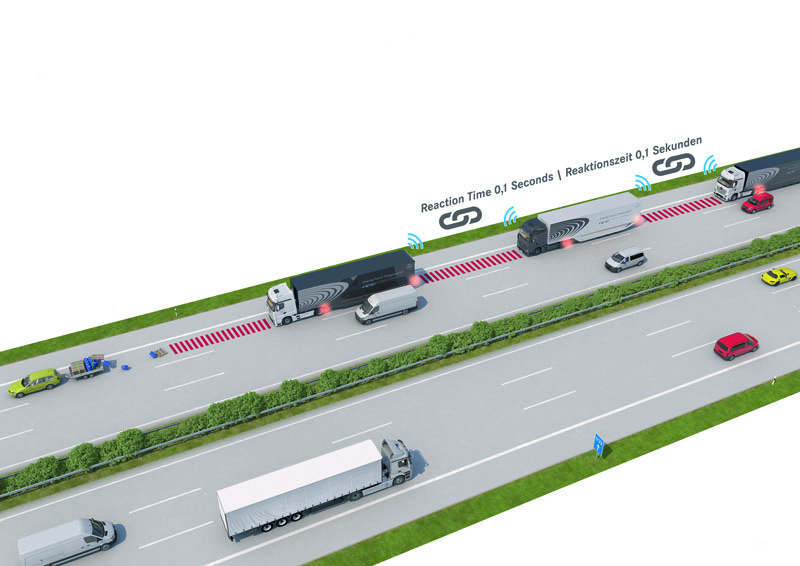
 Systém jízdních čet vozidel předpokládá potřebné elektronické vybavení pro samostatné řízení. Platoon jedoucích vozidel může přinést zajímavé výsledky v úspoře prostoru na silnici, v plynulosti dopravního provozu či dokonce ve spotřebě pohonných hmot tehdy, když bude jízdní četa dostatečně kompaktní. To znamená, že vozidla musí být řazena za sebou poměrně na těsno. Vzdálenost, se kterou dnešní řešení počítá, je zhruba patnáctimetrová. Při cestovní rychlosti cca 80 km/h (jak praví dopravní zákon) čtyřicetitunových jízdních souprav by rozhodně v takovém případě nestačily lidské reflexy. Z toho zřetelně vyplývá nutnost zavedení systémů zautomatizovaného příčného a podélného řízení.
Systém jízdních čet vozidel předpokládá potřebné elektronické vybavení pro samostatné řízení. Platoon jedoucích vozidel může přinést zajímavé výsledky v úspoře prostoru na silnici, v plynulosti dopravního provozu či dokonce ve spotřebě pohonných hmot tehdy, když bude jízdní četa dostatečně kompaktní. To znamená, že vozidla musí být řazena za sebou poměrně na těsno. Vzdálenost, se kterou dnešní řešení počítá, je zhruba patnáctimetrová. Při cestovní rychlosti cca 80 km/h (jak praví dopravní zákon) čtyřicetitunových jízdních souprav by rozhodně v takovém případě nestačily lidské reflexy. Z toho zřetelně vyplývá nutnost zavedení systémů zautomatizovaného příčného a podélného řízení.
Kořeny automatizované dopravy
Původně začal vývoj tzv. automatizovaných dálničních systémů (AHS) v šedesátých letech minulého století na státní univerzitě Ohio v týmu pod vedením Dr. Roberta E. Fentona. První automatizované vozidlo bylo postaveno právě zde v roce 1962, šlo také o první automobil vybavený počítačem. Řízení, brzdění a rychlost vozidla byla řízena elektronikou vezenou přímo v automobilu. Jenže hardware zabral jak kufr vozu, tak zadní sedadla a sedadlo spolujezdce vepředu. Výzkum pokračoval až do osmdesátých let, kdy byl ukončen zrušením financování ze strany státních institucí. Další vývoj pokračoval přes projekt USDOT, prototyp automatizovaného dálničního systému v Kalifornii v roce 1997. Automatizované řízení vozidel se stalo výzkumem, ve kterém se nejvíce prosazovaly automobilky Mercedes-Benz, BMW, Volkswagen a Toyota. Americká administrativa pro federální dálniční síť poté v roce 2013 odstartovala dva projekty jízdních čet těžkých nákladních vozidel, ale bez nutnosti automatizovaného řízení. První byl veden Univerzitou v Auburnu společně s automobilkou Peterbilt, asociací American Trucking a firmami Meritir Wabco a Peloton Technology. Na druhém projektu pracovaly pod vedením kalifornského úřadu pro dopravu společnosti UC Berkeley a Volvo Trucks. Mezitím v roce 2009 založila Evropská komise projekt výzkumu možnosti implementace provozu jízdních čet na evropských dálnicích bez nutnosti jejich modifikace. Projektu SARTRE (Safe Road Trains for the Environment) se zhostily automobilky Volvo Car Corporation a Volvo Trucks a v roce 2011 úspěšně předvedli první jízdní četu vozidel na zkušebním polygonu blízko švédského Gothenburgu a později ve španělské Barceloně.
V čele vývoje
. Vzdálenost mezi vozidly je 15 m a na zobrazovací jednotce (tabletu) všech vozidel v Platoonu je obraz z kamery řídícího trucku snímající situaci před řídícím vozidlem.") Od roku 2000 začal velmi intenzivně pracovat koncern Daimler AG na vývoji vlastních systémů automatizovaného řízení nákladních vozidel a jejich provozu v jízdních četách. Jak známo v roce 2014 předvedl Mercedes-Benz svoji studii Future Truck 2015, v roce 2015 dostal Daimler AG povolení k provozu tahačů Freightliner Inspiration Trucks vybavených modifikovaným systémem Highway Pilot v USA a následně v březnu roku 2016 předvedl první oficiální jízdu tří silničních souprav s tahači Actros osazených systémem Highway Pilot Connect v reálném provozu v Německu. Při té příležitosti uspořádal Daimler obrovskou mezinárodní prezentaci, na níž sezval zástupce sdělovacích médií a VIP zákazníků doslova z celého světa. Marketingoví specialisté druhého největšího výrobce nákladních vozidel na světě moc dobře věděli, co dělají, neboť v rámci převzetí vedoucí role v EU na dalšího půl roku Holandskou vládou byl naplánován tzv. Truck Platoonig Challenge 2016. Holandsko se rozhodlo, že ukáže celé EU možnosti tzv. platooningu a vyzvalo finální výrobce těžkých nákladních vozidel, aby se zúčastnili jakési hvězdicové jízdy z jejich domovských sídel do přístavu v Rotterdamu, a prokázali tak schopnosti tzv. Platooningu při cestě přes hranice jednotlivých evropských států. Svoji zdrcující aktivitou podpořenou nebývalým množstvím finančních prostředků se Daimler AG dostal v posledních patnácti letech do čela finálních výrobců, kteří dnes nabízí vozidla se systémem komunikace V2V (Vehicle to Vehicle) a směřují k plnému nasazení komunikace V2I (Vehicle to Infrastructure). Cesta k dnešnímu systému HP Connect zajišťujícímu pomocí WiFi spojení realizaci semiautonomní jízdy těžkých nákladních vozidel spojených do jízdních čet vedla přes vývoj tzv. multisenzorické fúze.
Od roku 2000 začal velmi intenzivně pracovat koncern Daimler AG na vývoji vlastních systémů automatizovaného řízení nákladních vozidel a jejich provozu v jízdních četách. Jak známo v roce 2014 předvedl Mercedes-Benz svoji studii Future Truck 2015, v roce 2015 dostal Daimler AG povolení k provozu tahačů Freightliner Inspiration Trucks vybavených modifikovaným systémem Highway Pilot v USA a následně v březnu roku 2016 předvedl první oficiální jízdu tří silničních souprav s tahači Actros osazených systémem Highway Pilot Connect v reálném provozu v Německu. Při té příležitosti uspořádal Daimler obrovskou mezinárodní prezentaci, na níž sezval zástupce sdělovacích médií a VIP zákazníků doslova z celého světa. Marketingoví specialisté druhého největšího výrobce nákladních vozidel na světě moc dobře věděli, co dělají, neboť v rámci převzetí vedoucí role v EU na dalšího půl roku Holandskou vládou byl naplánován tzv. Truck Platoonig Challenge 2016. Holandsko se rozhodlo, že ukáže celé EU možnosti tzv. platooningu a vyzvalo finální výrobce těžkých nákladních vozidel, aby se zúčastnili jakési hvězdicové jízdy z jejich domovských sídel do přístavu v Rotterdamu, a prokázali tak schopnosti tzv. Platooningu při cestě přes hranice jednotlivých evropských států. Svoji zdrcující aktivitou podpořenou nebývalým množstvím finančních prostředků se Daimler AG dostal v posledních patnácti letech do čela finálních výrobců, kteří dnes nabízí vozidla se systémem komunikace V2V (Vehicle to Vehicle) a směřují k plnému nasazení komunikace V2I (Vehicle to Infrastructure). Cesta k dnešnímu systému HP Connect zajišťujícímu pomocí WiFi spojení realizaci semiautonomní jízdy těžkých nákladních vozidel spojených do jízdních čet vedla přes vývoj tzv. multisenzorické fúze.
Fúze funkcí senzorů
O co jde? Vozidla vybavená systémem HP Connect jsou osazena zhruba čtyřmi stovkami různých senzorů snímajících různá data a informace. Základem jsou elektronické asistenční systémy, které ostatně Daimler AG či automobilka Mercedes-Benz uvedla do konstrukce nákladních vozidel během uplynulých třiceti let. Již v roce 1981 vybavil Mercedes svá nákladní vozidla systémem ABS, následoval systém ASR a EBS společně se systémy proti převrácení vozidla, Proximity Control Assist a Lane Keeping Assist stejně jako ESP. Pokud budeme tento vývoj v čase pečlivě sledovat, odhalíme právě zde zárodky systémového a systematického asistovaného řízení vozidla jak v příčném tak podélném směru.
V roce 2002 druhá generace tahačů Actros přivezla na trh také systém Hill Holder a Brake Assist. V roce 2006 vylepšený systém Brake Assist ABA doslova odstartoval novou úroveň bezpečnosti dopravního provozu. Poprvé bylo těžké nákladní vozidlo schopno automatické decelerace v okamžiku, kdy detekovalo před sebou pomaleji se pohybující překážku v provozu. Mezi lety 2009 a 2012 byl systém ABA vyvinut v dalších dvou generačních skocích až do varianty ABA 3, který byl schopen těžké nákladní vozidlo automaticky zabrzdit do klidu, pokud se v jeho směru jízdy objevila pevná překážka. V roce 2011, mezi tím, další generace vozidel Actros představila Attention Assist systém automatické detekce snížení pozornosti řidiče v důsledku únavy a vyčerpání. Systém byl rozšířením a doplněním stávajících možností systémů Proximity Control Assist a DistronicPlus.
 Paralelně s vývojem elektronických asistenčních systémů došlo také na automatizované či automatické ovládání převodovek. Přelomovým krokem bylo zavedení elektropneumatického systému řazení EPS v roce 1985. Dalším velkým skokem bylo uvedení plně automatizované převodovky Mercedes PowerShift v roce 2008 a její vývoj až k dnešní verzi PowerShift 3. Současné převodovky nabízí celou řadu funkcí, které výrazně přizpůsobují provoz vozidla danému úkolu. Jedním z vrcholných efektivních řešení je tzv. EcoRoll, neboli systém „plachtění“ vozidla. Mistrovským dílem v rámci vývoje asistenčních systémů je Predictive Powertrain Control (PPC), čili GPS tempomat schopný poskytovat svoji funkci na základě on-line změřených topografických hodnot zvolené trasy. Pro zákazníky v USA na dalších kontinentech mimo Evropu vyvinuli v Daimleru obdobný systém, Predictive Cruise Control (PCC). Přímým předchůdcem systémů semiautonomní jízdy byl projekt „Promote Chauffeur“ z roku 1999. Všechny výše jmenované systémy a ještě mnohé další sice dokázaly asistovat řidiči při ovládání samotného vozidla, ale k tomu, aby nahradily jeho smysly a končetiny, potřebovaly spojit pod jeden řídící systém a k tomu posloužila tzv. fúze senzorů.
Paralelně s vývojem elektronických asistenčních systémů došlo také na automatizované či automatické ovládání převodovek. Přelomovým krokem bylo zavedení elektropneumatického systému řazení EPS v roce 1985. Dalším velkým skokem bylo uvedení plně automatizované převodovky Mercedes PowerShift v roce 2008 a její vývoj až k dnešní verzi PowerShift 3. Současné převodovky nabízí celou řadu funkcí, které výrazně přizpůsobují provoz vozidla danému úkolu. Jedním z vrcholných efektivních řešení je tzv. EcoRoll, neboli systém „plachtění“ vozidla. Mistrovským dílem v rámci vývoje asistenčních systémů je Predictive Powertrain Control (PPC), čili GPS tempomat schopný poskytovat svoji funkci na základě on-line změřených topografických hodnot zvolené trasy. Pro zákazníky v USA na dalších kontinentech mimo Evropu vyvinuli v Daimleru obdobný systém, Predictive Cruise Control (PCC). Přímým předchůdcem systémů semiautonomní jízdy byl projekt „Promote Chauffeur“ z roku 1999. Všechny výše jmenované systémy a ještě mnohé další sice dokázaly asistovat řidiči při ovládání samotného vozidla, ale k tomu, aby nahradily jeho smysly a končetiny, potřebovaly spojit pod jeden řídící systém a k tomu posloužila tzv. fúze senzorů.
Na cestě do Matrixu
V tomto okamžiku (2014) se na scéně objevil komplexní řídící elektronický systém Highway Pilot (HP). Jeho druhá generace s rozšířenými schopnostmi, právě o tzv. konektivitu přes síť WiFi potom od letošního roku nese označení HP Connect. V porovnání se svým předchůdcem je HP Connect schopen komunikovat mezi vozidly na základě vezené telematické platformy. Specifický modul V2V využívá speciální WiFi rezervované právě pro komunikaci mezi vozidly. Konstantní přes data mezi vozy a příslušně zvoleným a nastaveným okolím umožňuje semiautonomní či autonomní jízdu celé jízdní čety. Hlavními součástmi HP Connect jsou kamery, radary, vysílače a přijímače elektronického signálu a hybridní modul řízení (Servotwin). Posledně jmenovaný modul zasahuje na základě přijímaných informací do mechanického systému řízení a realizuje podstatnou část oné automatické jízdy. Je opravdu nezbytné zmínit, že zcela zásadní jednotkou je v tomto případě stále ještě řidič. Ten má nad celým systémem vrcholovou kontrolu. Systém uvádí v činnost a ve kterémkoliv okamžiku jej může svým rozhodnutím a fyzickou intervencí zrušit či přimět k jiné činnosti. Stále se tedy pohybujeme v době, kdy řidič má jednoznačnou odpovědnost za jízdu byť v autonomním módu. Řidič je pán, a ten naštěstí ještě rozhoduje. Nicméně budoucí vývoj jistě překoná i tuto „maličkost“. Do té doby bychom se měli se změnami naší pozice a vysokou mírou odpovědnosti za bezpečnost dopravního provozu naučit pořádně žít. Jinak se může stát, že budeme jako lidé v elektronicky zasíťované budoucnosti poněkud ztraceni.
Převzato z časopisu ![]()
Fotogalerie






-6439289c3bc30_280x149.jpg "Honda Civic e:HEV Advance")



