Technika
Systém 4WS - Řízení všech kol
Pavel Biskup 28.05.2010 00:29

 Řízení všech kol opět přichází do módy. V osmdesátých letech je měly některé japonské vozy, nyní je oprášily hlavně BMW a Renault…
Řízení všech kol opět přichází do módy. V osmdesátých letech je měly některé japonské vozy, nyní je oprášily hlavně BMW a Renault…
Mercedes-Benz přišel koncem třicátých let s automobilem typu 170 VL (Vierradlenkung = řízení všech čtyř kol), který byl určen do volné krajiny a pro lesníky. Natáčením zadních kol v opačném směru než kola řídicí získal v tomto specifickém prostředí potřebnou obratnost, stejně jako německé štábní vozy té doby (Mercedes-Benz G5, BMW 325, Horch 801 a další). Koncem osmdesátých let se i v Evropě vozy 4WS, tedy s řízením všech kol znovu objevily, očekávala se jejich velká budoucnost. Jenže dlouho nevydržely, Honda Prelude 4WS se prodávala v letech 1987 až 1996, Mazda 626 4WS jen dva roky (1989 – 1990) a MX6 čtyři roky (1992 – 1995). Ani další japonské automobilky nezahálely, do Evropy se s řízením všech kol odvážil Mitsubishi 3000 GT víceméně na zkoušku a také Galant GTI Dynamic 4WD + 4WS měl na našem kontinentu propagační jízdu. Nissany se systémem HICAS 4WS (Skyline a Fairlady) se prodávaly jen doma.
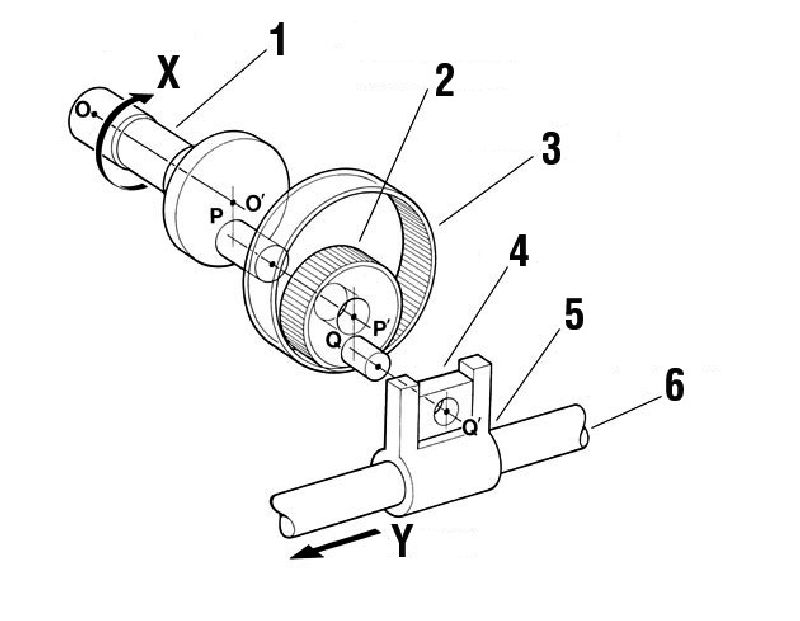
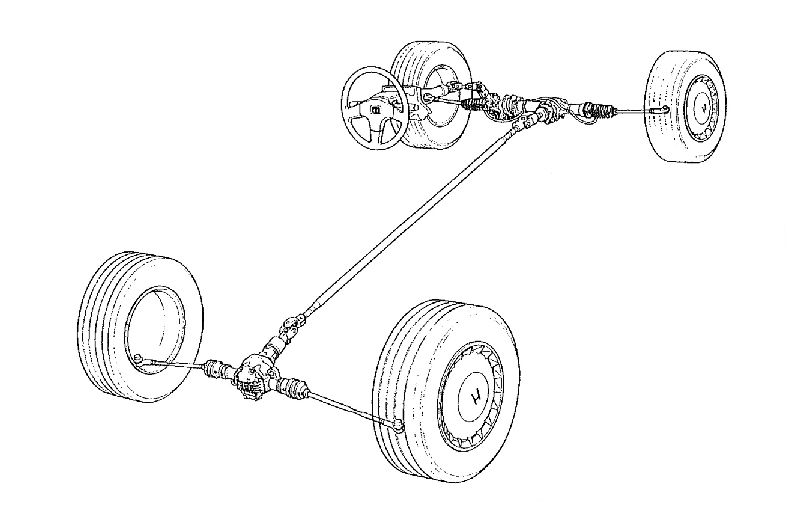
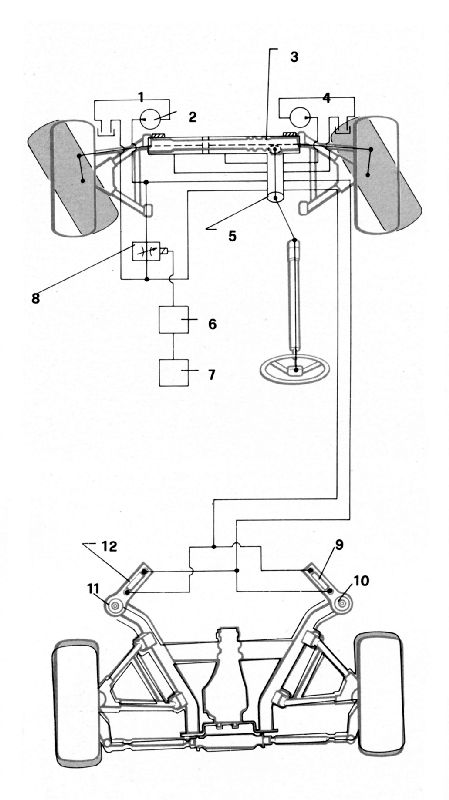
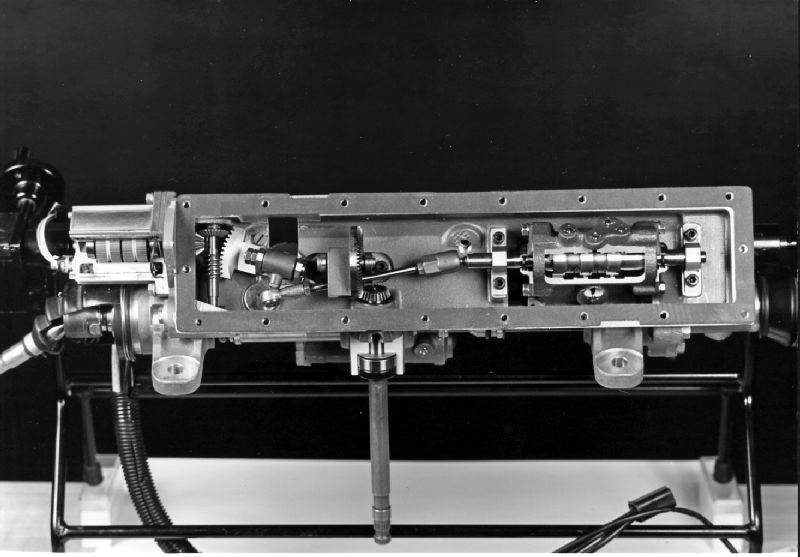
Vozy se všemi řiditelnými koly měly své opodstatnění. Při nízkých rychlostech do 35 km/h, které odpovídají pohybu ve stísněném prostoru (např. na parkovišti) se natočením zadních kol do opačného směru (proti předním) poloměr otáčení zmenšuje a vůz je obratnější (menší průměr otáčení o jeden metr při výchylce kol do 5°). Natočení kol obou náprav stejným směrem bylo určeno po vyšší rychlosti pro zlepšení stability při vyhýbacím manévru, změně jízdního pruhu, či běžné jízdě do zatáčky. Lze totiž prokázat, že k dynamickému optimu jízdy se v těchto případech dá přiblížit, pokud zásah řidiče podpoří ještě vytočení kol zadní nápravy. První řešení sériového vozu Honda Prelude 4WS bylo ryze mechanické, o to však zajímavější. Otáčivý pohyb volantu se přenášel z přední převodky řízení kloubovým hřídelem na převodku řízení zadních kol, kde mechanismus měnil rotační pohyb jednoho smyslu točení na posuvný pohyb v obou směrech. Dělo se tak výstředným čepem satelitu planetového převodu pohybujícího tyčí řízení prostřednictvím vertikálně posuvného členu podle jeho momentální polohy vlevo i vpravo.  Kola se do protisměru natáčela nejvíce o 5°, souhlasně pak o 2°. Vzhledem k tomu, že šlo o první vůz s touto funkcí v Evropě, pohled do poznámek autora z tehdejšího testu říká, že dojem z jízdy splnil očekávání. Není se však co divit, že tento mechanický způsob brzy zmizel ze scény. Předně byl náročný na výrobu (tvořil asi 5 % ceny vozu), vážil 15 kg a hlavně už přicházela elektronika. Později u Prelude přišla ke slovu elektronická řídicí jednotka, která na základě údajů z čidel (natočení volantu, rychlost vozu, otáčky kol atd.) vydávala příkazy pro nastavení kol elektromotorem na řídicí tyči. Mitsubishi zvolil variantu jen souběžného natáčení všech kol, kde byl hydraulický systém schopen vychýlit zadní o 1,5°. V devadesátých letech tyto systémy pozvolna mizely pro vysoké náklady a malý zájem. Automobilky raději volily jednodušší řešení, kterým je pasivní řízení zadní nápravy pomocí elastokinematického uložení jejích prvků, jež působením bočních sil při změnách směru jízdy jsou schopny v menším rozsahu natočení kol zajistit. Vývoj se nezastavil a do automobilů přišla funkce ESP, stabilizující zvolený směr jízdy, což byl výrazný milník na cestě k bezpečnějšímu vozu.
Kola se do protisměru natáčela nejvíce o 5°, souhlasně pak o 2°. Vzhledem k tomu, že šlo o první vůz s touto funkcí v Evropě, pohled do poznámek autora z tehdejšího testu říká, že dojem z jízdy splnil očekávání. Není se však co divit, že tento mechanický způsob brzy zmizel ze scény. Předně byl náročný na výrobu (tvořil asi 5 % ceny vozu), vážil 15 kg a hlavně už přicházela elektronika. Později u Prelude přišla ke slovu elektronická řídicí jednotka, která na základě údajů z čidel (natočení volantu, rychlost vozu, otáčky kol atd.) vydávala příkazy pro nastavení kol elektromotorem na řídicí tyči. Mitsubishi zvolil variantu jen souběžného natáčení všech kol, kde byl hydraulický systém schopen vychýlit zadní o 1,5°. V devadesátých letech tyto systémy pozvolna mizely pro vysoké náklady a malý zájem. Automobilky raději volily jednodušší řešení, kterým je pasivní řízení zadní nápravy pomocí elastokinematického uložení jejích prvků, jež působením bočních sil při změnách směru jízdy jsou schopny v menším rozsahu natočení kol zajistit. Vývoj se nezastavil a do automobilů přišla funkce ESP, stabilizující zvolený směr jízdy, což byl výrazný milník na cestě k bezpečnějšímu vozu.
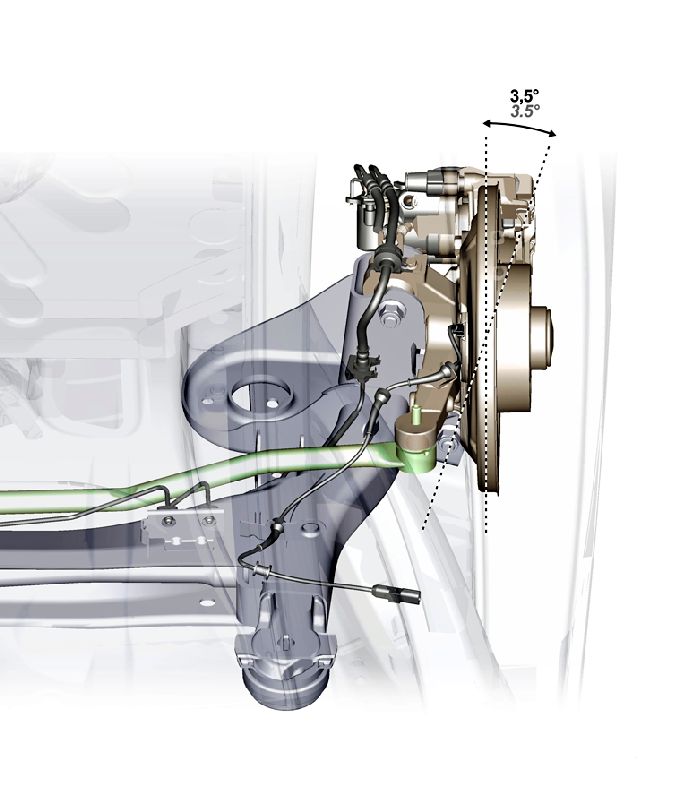
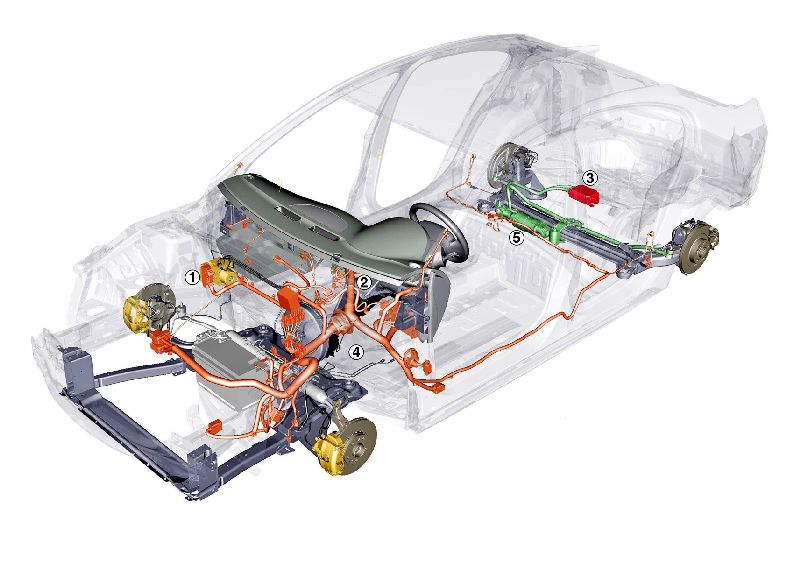
Nápad s natáčením zadních kol však nezapadl. U velkých automobilů stále lákala jejich lepší manévrovatelnost a nárůst bezpečnosti při vyšších rychlostech, a tak se znovu objevují vozy, které na tuto epizodu z doby před třiceti lety navazují, ovšem odpovídají dalšímu technickému pokroku. Nový Renault Laguna GT dostal systém, jenž při rychlostech do 60 km/h natáčí zadní kola až o 3,5° proti natočení předních, a to pro lepší manévrovatelnost; do stejného směru je vytáčí se shodným maximem 3,5° při rychlosti nad 60km/h a zajišťuje tak lepší jízdní vlastnosti. Natáčení vykonává aktivní člen (servomotor) na přední straně nápravy, který na základě impulzu elektronické jednotky přes pákový mechanismus ovládá jejich speciální řídicí tyče. Pracuje jen při pohybu vozu, aby při stání těsně u chodníku nebyla kola blokována a nedošlo k poškození. Srovnávací test Laguny GT a Laguny bez tohoto zařízení prokázal při vyhýbacím manévru, že verze GT je jej schopna zvládnout při stejné rychlosti 125km/h výrazně klidnější jízdou s menším úsilím řidiče (a také při 135 km/h, zatímco běžná Laguna nikoli). Pokud jde o manévrovatelnost, byl naměřen průměr otáčení menší o 0,30 m místo udávaných 0,70 m.
 Podobný systém použili tvůrci nové generace BMW řady 7 (viz AR 3/’09). Elektrický akční člen je umístěn na zadní straně hliníkové integrální nápravy a svým vřetenem působí na obě řídicí tyče, jež vytáčejí zadní kola v rozsahu 3° na každou stranu; jako u Laguny je rychlostní rozhraní 60 km/h. Rovněž u BMW prokázali pozitivní vliv na ovládání vozu ve vyšších rychlostech, a to jak během vyhýbacích manévrů, tak při projíždění ostrých zatáček. Obratnost se viditelně zvýšila zvláště u verze L se zvětšeným rozvorem náprav. Další typy následovaly, např. nový BMW řady 5 a Infiniti G37. Myšlenka je tedy opět živá, počítá se s možností řízení každého ze čtyř kol individuálně podle aktuální situace v ještě užší spolupráci se systémem elektronické stabilizace ESP.
Podobný systém použili tvůrci nové generace BMW řady 7 (viz AR 3/’09). Elektrický akční člen je umístěn na zadní straně hliníkové integrální nápravy a svým vřetenem působí na obě řídicí tyče, jež vytáčejí zadní kola v rozsahu 3° na každou stranu; jako u Laguny je rychlostní rozhraní 60 km/h. Rovněž u BMW prokázali pozitivní vliv na ovládání vozu ve vyšších rychlostech, a to jak během vyhýbacích manévrů, tak při projíždění ostrých zatáček. Obratnost se viditelně zvýšila zvláště u verze L se zvětšeným rozvorem náprav. Další typy následovaly, např. nový BMW řady 5 a Infiniti G37. Myšlenka je tedy opět živá, počítá se s možností řízení každého ze čtyř kol individuálně podle aktuální situace v ještě užší spolupráci se systémem elektronické stabilizace ESP.
Zdroj: Automobil 04/10
Autor: Pavel Biskup
Fotogalerie









-6439289c3bc30_280x149.jpg "Honda Civic e:HEV Advance")



